 |
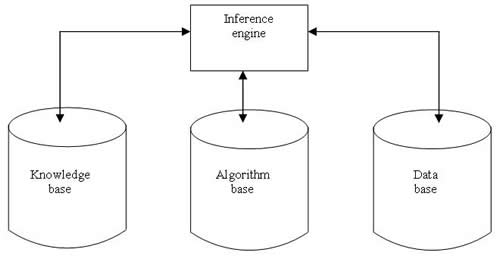
Planificarea bazata pe cunostinte 1. Siteme bazate pe cunostinte – descriere Sistemele bazate pe cunostinte sunt sisteme bazate pe tehnicile si metodele inteligentei artificiale. Componentele lor centrale sunt: baza de cunostinte si mecanismele de inferenta. Arhitectura holonica, care conduce sistemul este compusa dintr-o baza algoritmica, care programeaza operatiile conform unui algoritm euristic, si un mecanism de inferenta care preia sarcina de programare a operatiilor atunci cand anumite resurse(ex: roboti) nu sunt disponibile.
Daca algoritmul euristic este activat el incearca sa gaseasca o solutie, dar daca apar probleme acesta apeleaza la regulile de productie, care cauta o solutie prin inferenta.
Structura KBSS 2. Baza algoritmica In functie de performantele testate(Kusiak, 1990), sase reguli de programare au fost incorporate in algoritmul euristic:
Setare timp curent la t=0 si starea resursei srlq=1, q∈Ql , l∈L
3. Mecanismul de inferenta Mecanismul de inferenta din KBSS controleaza procedura de declansare a regulilor din baza de cunostinte si procedura de generare a programului unui algoritm. Un avantaj al acestei arhitecturi in tandem este simplitudinea mecanismului de inferenta. Mecanismul de inferenta din KBSS foloseste o strategie de control de tip forward chain. Dandu-se o anumita clasa de reguli el incearca sa execute toate regulile care sunt legate de contextul considerat. Daca o regula este executata, ex: conditiile sunt adevarate, atunci actiunile regulii sunt executate. Unele reguli opresc cautarea daca mecanismul de inferenta si schimba controlul procesului la algoritm.
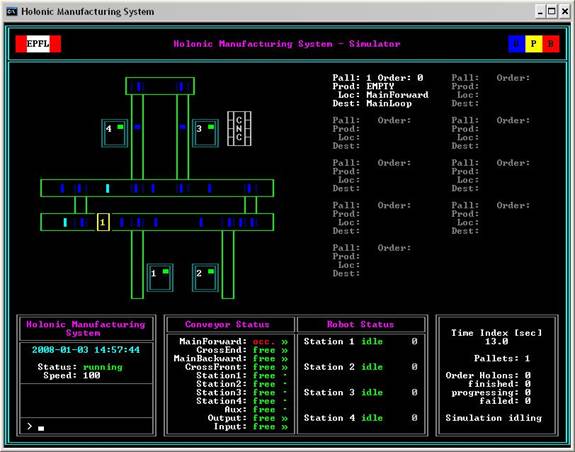
4. Folosirea simulatorului la planificare Calcularea unei planificari valide si optimale este echivalenta cu gasirea unei succesiuni pentru executia operatiilor care intra in componenta unui ordin si asocierea in timp a acestor operatii cu resursele sistemului. Aceasta planificare trebuie sa indeplineasca doua cerinte: in primul rand sa fie valida si in al doilea rand sa optimizeze o anumita functie de cost. Programul de planificare implementat foloseste un algoritm euristic, algoritmul de planificare bazat pe regulile de prioritate, pentru a genera planificarea ordinelor, iar partea de alocare in timp a resurselor se face folosind un simulator in care se observa evolutia in timp a ordinelor deja planificate. O operatie deja planificata si introdusa in simulator este considerata alocata unei resurse si nu mai poate fi scoasa din planificator. Cele 2 faze, planificarea si simularea, sunt interdependente deoarece in functie de gradul de ocupare al sistemului si in particular de gradul de ocupare al resurselor de procesare se face inserarea noilor palete in sistem (planificarea primei operatii), apoi pentru paletele deja existente se face planificarea urmatoarelor operatii.
Simulatorul grafic folosit in planificarea ordinelor
Ultima modificare 29.05.2008 |