 |
Documentatie tehnica 1. Adept Robotii care opereaza in sistem sunt controlati de acelasi sistem de operare in timp real, V+, care se ocupa de toate operatiile sistemului la toate nivelurile, precumI/E, executia programelor, managementul taskurile, managementul memoriei si operatiile cu fisierele de pe disc. Ca sistem de operare, V+ are o istorie bogata, el evaluand in acest timp intr-un sistem de operare pentru roboti puternic, sigur si predictibil. V+ este singurul sistem care ofera o solutie integrata tuturor cerintelor de programare dintr-o celula robotizata: siguranta, controlul miscarii robotului, operatii cu vederea, masurarea fortei si I/E. Pentru mai multe informatii despre V+ pot fi consultate manualele electronice: V+ Language Users Guide and V+ Language Reference Guide.
Impreuna cu sistemul de operare V+, Adept ofera si alte programe care ajuta la dezvoltarea aplicatiilor care implica roboti, vedere si alte echipamente industriale: "Vision Products" care contine AdeptSight si AdeptVision. Optiunea AdeptVision sAVI Guidance ofera facilitati de inspectie si ghidare vizuala oricarui robot Adept. Interfatarea miscarii si a vederii este facila deoarece instructiunile de vedere sunt integrate in V+ si AIM MotionWare. Utilitarul Adept de calibrare al camerei suporta orice mod de montare al camerei si compenseaza distorsiunea de perspectiva. Se alege soluţia AdeptSight, bazata pe hardware PC si software video in vederea asigurării atat a functionalitatii de ghidare vizuala a braţului manipulator robot cat si a integrării sistemului robot in producţie/servicii. Aceasta soluţie asigura compatibilitatea cu controllerul SmartController CX si limbajul V+. Licenţele furnizate permit instalarea programelor de gestiune vizuala de scene fixe, recunoastere după model, măsurători, instrumente VA, localizare si utilitarelor de calibrare electromecanica si camera-robot.
Conectivitatea pachetului AdeptSight este realizata prin:
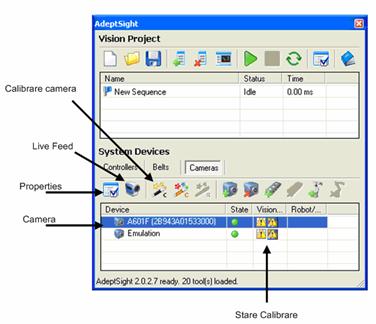
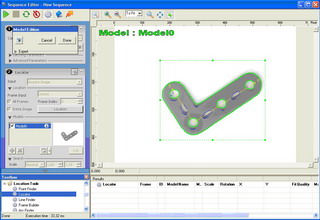
1.1. Procedura de lucru cu AdeptSight
4. Se seteaza parametrii Shutter(Expunerea), Gain(Amplificarea) si Brightness(Luminozitatea) si apoi se calibreaza camera.
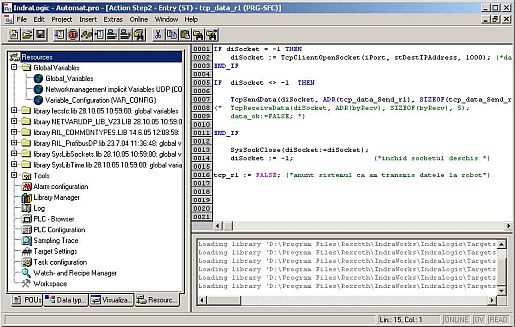
5. Se ruleaza in bucla aceasta secventa. La ea se conecteaza robotul pentru a obtine informatii referitoare la tipurile de obiecte recunoscute si la pozitiile acestora. 2. Bosch IndraWorks este disponibil ca un mediu de programare universal si integrat pentru sistemele IndraMotion, IndraLogic si IndraDrive. Utilizatorul beneficiaza de un acces rapid si transparent la toate functiile si datele sistem pentru toate componentele. Folosind unelte si interfete standardizate utilizatorul poate creea solutii pentru toate task-urile intr-un mediu unic si centralizat – este integrat, eficient si intuitiv. Mai multe informatii despre IndraWorks si IndraLogic se pot obtine accesand adresa. Programarea automatului care conduce celula se face cu ajutorul aplicatiei IndraLogic. Dupa scrierea programului acesta poate fi testat local, prin bifarea optiunii "Online/Simulation Mode", sau incarcat direct pe automat prin selectarea IP-ului automatului din parametrii de comunicatie.
Fereastra principala IndraLogic Ultima modificare 29.05.2008 |