 |
Roboti
1. Manipulator
1.1. Robot cartezian
Adept Python este o famile de module lineare de calitate inalta pentru aplicatii de asamblare si manipulare a materialelor.
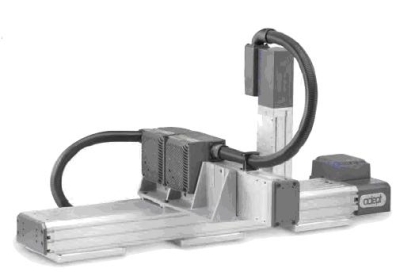
Adept Phyton
Modulele lineare Python pot fi combinate in mai multe configuratii, de tipul cu o singura axa, cu doua axe sau cu trei axe. Optiunile de montare ofera posibilitatea instalarii sistemului pe sol, masa sau tavan.
Performante modulului linear Adept Python sunt exemplificate in cele ce urmeaza:
- Encodere absolute elimina miscarea de calibrare;
- Encodere de rezolutie inalta pentru urmarirea traiectoriei de inalta precizie la viteze mici;
- Motoare de eficienta inalta ofera o performanta inalta cu un cuplu mai mare;
- Servo rata de actualizare de 8kHz pentru obtinerea unei perioade mici de stabilizare si urmarirea traiectoriei.
Sistemul tipic linear modular Python include:
- Mecanisme lineare modulare de 1-, 2- si 3 axe;
- SmartControllerTM CX Adept (cu software-ul instalat);
- Pachet de siguranta PDU3 cu filtrare a alimentarii de curent alternativ si protectie la supratensiune;
- Servo Controller Adept MotionBloxTM-10 si amplificator pe fiacre axa;
- Panou frontal cu cu oprire de urgenta;
- Software AdeptWindowsTM;
- Software NFS;
- Ethernet TCP/IP.
Specificatii generale si caracteristici standard:
- Cursa de deplasare de la 100 la 1600 mm (intervalul de miscare);
- Viteza maxima de pana la 1450 mm/s;
- Repetabilitate ±0.010 mm;
- Sarcina de lucru maxima 80kg;
- Encodere absolute cu rezolutia de minim 16-biti;
- Suruburi cu bile pentru o gixare de precizie inalta;
- Drivere servo-motoare de curent alternativ integrate cu procesoare on-board;
- Lagare lineare de calitate inalta.
Tip modul |
Modul L08 |
Modul L12 |
Modul L18 |
Dimensiuni |
85 mm |
125 mm |
185 mm |
Pas surub cu bile |
10 mm |
10 mm |
10 mm |
|
20 mm |
20 mm |
20 mm |
Sarcina de lucru maxima |
|
|
|
Orizontal |
20 kg |
40 kg |
80 kg |
Vertical |
10 kg |
20 kg |
40 kg |
Moment de transport |
|
|
|
Rolling |
70 Nm |
300 Nm |
700 Nm |
Pitching |
50 Nm |
260 Nm |
500 Nm |
Yawing |
50 Nm |
200 Nm |
450 Nm |
Cursa de deplasare disponibila |
100-800 mm |
200-1500 mm |
300-1600 mm |
1.2. Robot articulat orizontal
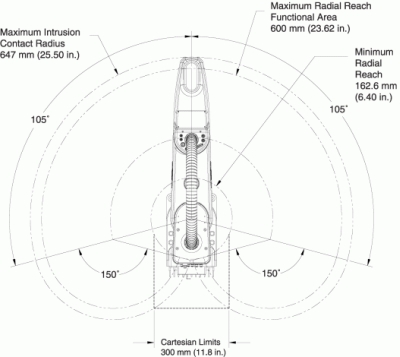
Sistemul robot de inalta performanta Adept Cobra s600 utilizat in aplicatii de asamblari mecanice, manipularea materialelor, impachetare materiale, alimentare/descarcare utilaje, insurubare si alte operatii ce necesita automatizare precisa si sigura.
Performantele robotulul Adept Cobra s600:
- Encodere absolute pentru calibrare usoara;
- Encodere de rezolutie inalta pentru urmarirea traiectoriei de inalta precizie la viteze mici;
- Motoare de eficienta inalta ofera o performanta inalta cu un cuplu mai mare;
- Drivere cu armonice de inertie redusa ce ofera acceleratia maxima;
- Senzorii de temperatura ce monitorizeaza motoarele si amplificatoarele, ofera performanta maxima si fiabilitate;
- Rata de actualizare de 8kHz pentru servo-control si urmarirea traiectoriei

Adept Cobra 600
Specificatiile tehnice brat mecanic robot:
1.3. Robot articulat vertical
Braţul robot articulat vertical de tip Adept Viper oferă 6 grade de libertate, 6 axe, fiind recomandat datorita complianţei, repetabilităţii si preciziei superioare de poziţionare / urmărire de traiectorii complexe. Acest braţ este ideal pentru operaţii de manipulare si interacţiune cu materiale – in scop de transfer, montaj, împachetare a materialelor, alimentare / descărcare utilaje si alte aplicatii care cer o automatizare precisa si rapida.

Adept Viper
Sistemul Adept Viper s650 include următoarele componente:
- Braţ robot articulat vertical Adept Viper 650;
- Adept SmartController CX (cu software instalat);
- Şasiu de putere PA-4 cu servo controllere si amplificatoare;
- Panou frontal cu Oprire de Urgenta (consola operator de proces);
- Cablu robot lungime 4 m;
- Software AdeptWindows;
- Software NFS (Network File Server);
- Ethernet TCP/IP;
- Gripper electro-pneumatic tip paralel;
- Documentaţie completa utilizator.
Braţul mecanic robot are urmatoarele specificatii tehnice:
- Anvelopa de lucru (cursa maxima cu braţul in extensie: 653 mm);
- Sarcina de lucru transportabila: 5kg (max.);
- Domeniile de deplasare (6 axe, 6 articulaţii de rotaţie):
- Axa (articulaţia) 1: ± 170°,
- Axa (articulaţia) 2: -170°,+45°,
- Axa (articulaţia 3): -29°, +256°
- Axa (articulaţia) 4: ±190°,
- Axa (articulaţia) 5: ±120°,
- Axa (articulaţia) 6: ± 360°;
- Momente de inerţie (max.): Articulaţiile 4,5:0.295 kgm2; articulaţia 6: 0.045 kgm2
- Viteza compusa (max.) la vârf: 8200 mm/s;
- Viteze in articulaţii:
- Articulaţia 1: 328°/s,
- Articulaţia 2: 300°/s,
- Articulaţia 3: 375°/s,
- Articulaţia 4: 375°/s,
- Articulaţia 5: 375°/s,
- Articulaţia 6: 600°/s;
- Repetabilitate (XYZ): ± 0.020 mm;
- Conexiuni utilizator interne: 10 electrice, 1 pneumatic;
- Frâne: Articulaţiile 2-6;
- Grad de protecţie: IP40;
- Posibilitati de montare: sol / masa sau tavan;
- Greutate: 28kg.
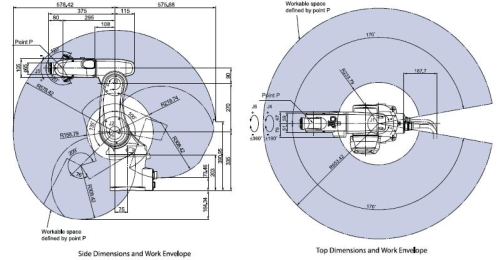
Anvelopa de lucru a robotului Adept Viper .
2. Modul de invatare manuala Adept T1 TeachPendant
Kitul Adept T1 Pendant contine:
- Modul de invatare manuala Adept T1 cu cablu de 10m;
- Cablu de conectare cu controllerul SmartController CX;
- Plug by-pass pentru eliberare accidentala;
- Documentatie utilizator.
Conectare software la SmartController:
Specificatii hardware ale Adept T1 Pendant:
- Diametru 250 mm, inaltime 250 mm (incl. mâner);
- Greutate 1. 29 kg; Lungime cablu 10 m (standard);
- Afisaj LCD 120mmx90mm, rezolutie 320x240 pixel, 256 de culori;
- 1 comutator pentru oprire de urgenta si 2 comutatoare de activare;
- Temperatura de operare 0-50°C, umiditate 5-90%, rezistenta la socuri 15g/ 11 ms (IEC 61131);
- Grad de protectie IP64.
Ultima modificare 29.05.2008

|